154.com皇冠
“科研成果快报”
1. 标题
Landmark Graph-based Indoor Localization
基于地标图的室内定位
2. 成果信息
Gu, F., Valaee, S., Khoshelham, K., Shang, J., & Zhang, R. (2020). Landmark Graph-based Indoor Localization. IEEE Internet of Things Journal.
URL: https://ieeexplore.ieee.org/abstract/document/9076309
DOI: 10.1109/JIOT.2020.2989501
This work is supported by the National Key Research and Development Program of China (No.2016YFB0502200).
3. 成果团队成员
古富强(第一作者),研究员,新加坡国立大学。研究方向:室内定位、活动识别、机器人和机器学习。
Email: fuqiang.gu@nus.edu.sg
Shahrokh Valaee, 教授,多伦多大学,IEEE Fellow,加拿大工程院院士。 研究方向:无线定位、机器学习、5G、车联网
Email: valaee@ece.utoronto.ca
Kourosh Khshelham,高级讲师,墨尔本大学。研究方向:室内定位、移动制图、机器学习、计算机视觉。
Email: k.khshelham@unimelb.edu.au
尚建嘎(通讯作者),教授,154.com皇冠。研究方向:室内定位导航、室内制图与建模、人机物融合的软件技术。
Email: jgshang@cug.edu.cn
Rui Zhang,教授,墨尔本大学。研究方向:数据挖掘、人工智能、机器学习、推荐系统。
Email: ruizhang@unimelb.edu.au
4. 成果介绍
室内定位是基于位置的服务、移动社交网络、应急响应、增强现实等应用的关键技术之一。现有的室内定位方案往往需要部署额外的硬件/基础设施、定位精度低、耗时耗力等缺点。融合空间信息是一种有效的提高定位精度并且不需要额外部署硬件的解决方案,但已有的融合空间信息的定位方案所需的计算量大且健壮性较差。为了解决这些问题,我们提出了基于地标图(landmark graph)的室内定位解决方案(称为LG-Loc)。与已有的系统相比,我们提出的解决方案具有成本低、精度高、便于大规模部署等优点。
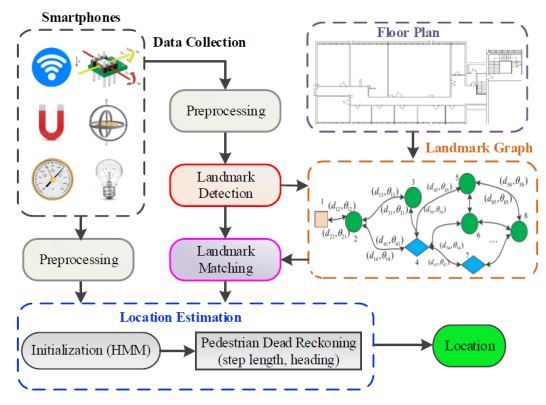
图1 算法架构
方法分为离线阶段(训练阶段)和在线阶段(运行阶段)。
l 离线阶段:利用智能手机内嵌的各种传感器数据(包括加速度计、陀螺仪、磁力计、气压计、WiFi等),结合可用的室内地图(或楼层图)信息,构建包含地标点和地标点之间相对方向的地标图。在本研究中,我们定义地标点为室内空间中固有的一些关键位置点(例如楼梯口、电梯口、拐角等),智能手机内置的传感器在经过这些关键位置点时会呈现出一些可识别、可区分以及稳定的变化模式。
l 在线阶段:首先基于各种传感器读数和所构建的地标图,利用隐式马尔科夫链计算出用户的初始位置;然后基于加速度计读数和陀螺仪读数计算出用户的步长和步行方向,进而利用行人航位推算方法估算出用户的实时位置;最后,基于各种传感器读数的变化模式,结合所构建的地标图,对行人航位推算方法得出的位置进行校对,从而保证定位误差保持在一个很小的范围。
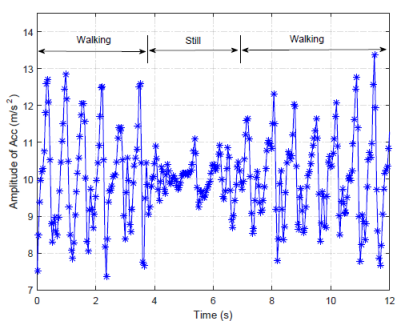
图2 基于加速度读数的地标点
(用户在经过门时,手机里的加速度读数会经历上述变化趋势)
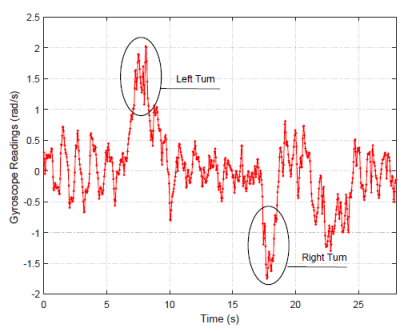
图3 基于陀螺仪读数的地标点
(用户在经过拐角时,手机里陀螺仪的读数变化)
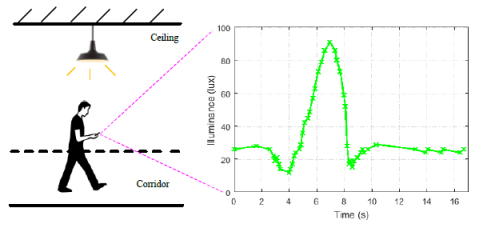
图4 基于光线传感器读数的地标点
(用户在经过LED下方时,手机里的光线传感器的读数变化)
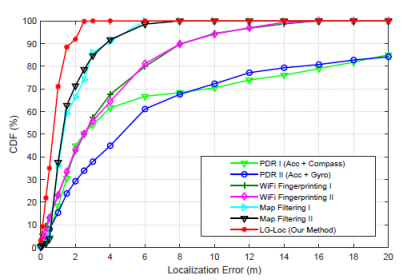
图5 我们提出的方法(LG-Loc)与已有方法的定位误差比较
创新点:
1. 提出了Sensory landmark和landmark graph的概念,以及如何准确的检测landmark的方法。
2. 提出了一种基于landmark graph的室内定位解决方案,并在现实环境中通过实验验证了方法的可行性。
应用价值:该方法具有定位精度高、计算效率高、成本低等诸多优点,可广泛应用于各种大型商场、机场、车站等。