154.com皇冠
“科研成果快报”
1. 标题
A Data-driven Approach to Learning Saliency Model of Indoor Landmarks by Using Genetic Programming
一种数据驱动的基于遗传编程的室内地标显著度模型学习方法
2. 成果信息
Hu, X., Ding, L., Shang, J., Fan, H., Novack, T., Noskov, A. and Zipf, A., 04 Jan 2020. Data-driven approach to learning salience models of indoor landmarks by using genetic programming, International Journal of Digital Earth.
URL: https://www.tandfonline.com/doi/full/10.1080/17538947.2019.1701109
DOI: 10.1080/17538947.2019.1701109
The study is supported by the National Key R&D Program of China (No. 2016YFB0502203), the National Natural Science Foundation of China (Grant No. 41271440), and the China Scholarship Council.
3. 成果团队成员
胡旭科(第一作者),博士生, 德国海德堡大学。 研究方向:室内定位、室内制图与建模、志愿者地理信息、 社交媒体数据分析。
Email: xuke.hu@uni-heidelberg.de
丁磊,硕士生,中国地质大学(武汉)地理信息工程学院。研究方向:室内定位、室内制图与建模。
Email: dinglei@cug.edu.cn
尚建嘎(通讯作者),教授,154.com皇冠。研究方向:室内定位导航、室内制图与建模、人机物融合的软件技术。
Email: jgshang@cug.edu.cn
范红超,教授, 挪威科技大学土木与环境工程系。 研究方向: 志愿者地理信息、三维城市建模、激光扫描、摄影测量。
Email: hongchao.fan@ntnu.no
Alexey Noskov,博士后,德国海德堡大学地理信科学研究所。研究方向:志愿者地理信息、空间数据融合、3D可视化、区块链。
Email: a@n-kov.com
Tessio Novack,博士后,德国海德堡大学地理信科学研究所。研究方向:志愿者地理信息、地理数据质量分析和集成、空间统计。
Email: novack@uni-heidelberg.de
Alexander Zipf,教授,德国海德堡大学地理信科学研究所。研究方向:志愿者地理信息、 地理数据分析与处理
Email: zipf@uni-heidelberg.de
4. 成果介绍
在基于地标的导航应用中,从决策点位置的多个候选地标中确定最显著的地标具有很大挑战性。为了解决这个问题,当前的方法通常依赖于线性模型来测量地标的显著性。但是,线性模型并不能建立地标属性与其显著性之间精确的定量关系。此外,评估这些方法时,选取的实验场景数量和测试者数量通常是有限的。据此,我们提出通过遗传编程(GP)来学习一个非线性地标显著度估计模型。根据两个大型购物中心中200个测试场景的照片以及200个测试人员产生的实验数据,我们将提出的方法与现有算法进行了比较。实验结果表明,在76%的情况下,我们提出的方法可以正确预测出最显著的地标,这一结果大大高于传统线性模型所达到的准确率。
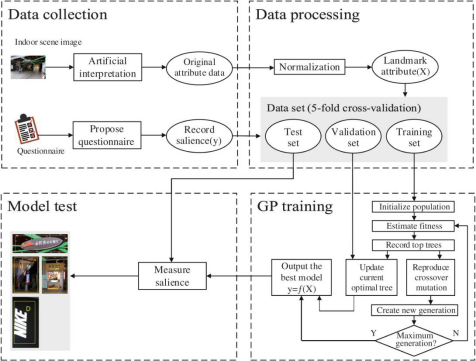
图1 算法架构
所提出方法主要包括三个阶段:数据收集和处理,基于遗传编程的模型训练,以及模型测试。
首先,我们在两个大型购物中心收集了200个室内场景的图片,并在每个图片中手动标记出地标。然后提取出每个地标的多个属性,并将属性值进行归一化处理。然后,通过问卷调查收集志愿者对地标的偏好。具体来说,我们要求每个志愿者选择他/她认为最适合在某个场景中用于导航的地标。选择某个地标的志愿者的百分比用作该地标的显著性值。在训练阶段,我们使用了一种遗传编程算法来学习一个测量地标显著性的非线性模型。在测试阶段,我们使用学习的模型来计算测试场景中每个地标的显著度。显著度最高的地标被认为是该场景中的代表性地标。
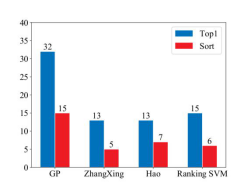
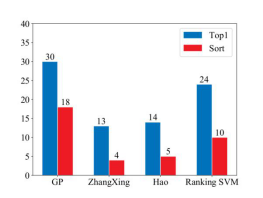
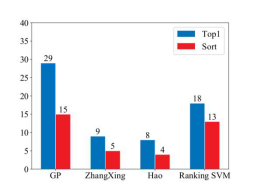
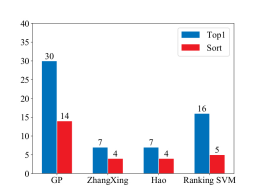
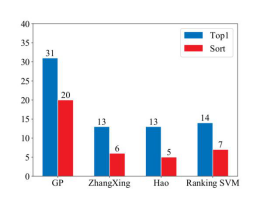
图2 不同方法在五个测试组的结果比较。每个测试组包含40个场景。图中条柱代表正确预测的场景数量。
创新点:
1. 首次提出用遗传编程学习一个非线性模型用于估计室内地标的显著度。
2. 创建并公开了一个大型的涉及到200个志愿者和200个场景的地标显著度评估基准数据。
应用价值:可用于基于地标的室内导航,提高行人在大型室内环境的寻路效率,并减少该过程中可能产生的焦虑情绪。