1. 标题
· 基于Android智能手机的电离层约束单频PPP和GNSS观测性能评估
· Ionosphere-Constrained Single-Frequency PPP with an Android Smartphone and Assessment of GNSS Observations
2. 成果信息
· Guangxing Wang.; Yadong Bo.; Qiang Yu.; Min Li.; Zhihao Yin.; Yu Chen. Ionosphere-Constrained Single-Frequency PPP with an Android Smartphone and Assessment of GNSS Observations. Sensors 2020, 20, 5917.
· 论文链接:https://www.mdpi.com/1424-8220/20/20/5917
· 项目支持:武汉大学地球空间环境与大地测量教育部重点实验室开放基金资助项目(项目编号:18-01-06),国家自然科学基金(项目编号:41804033,42004073),中央高校基本科研业务费专项资金资助项目(项目编号:CUGL180831).
3. 成果团队成员
王广兴,博士,154.com皇冠,讲师,硕士生导师。研究方向GNSS精密单点定位及模糊度固定理论与方法。
薄亚东,硕士研究生,154.com皇冠,研究方向为Android智能手机精密定位方法。
余强,硕士,154.com皇冠,研究方向为Android智能手机精密定位方法。
李敏,博士,武汉大学卫星导航定位技术研究中心,教授,博士生导师。研究方向包括:IGS高精度数据分析、北斗/GNSS多系统精密定轨定位和对地观测卫星精密定轨。
尹志豪,硕士研究生,154.com皇冠,研究方向为北斗/GNSS服务性能分析。
陈于,博士,154.com皇冠,讲师,硕士生导师。研究方向为遥感数据处理与信息提取、结合GNSS的遥感地质灾害监测应用、GPS气象可降水量反演计算理论与应用、GPS建模与定位计算。
4. 成果介绍
随着全球卫星导航系统(GNSS)的不断发展,GNSS服务已经与人们的日常生活密不可分。2016年,Google公司推出Android系统7.0版本,开始支持输出GNSS原始观测值,使得Android移动设备高精度定位成为可能。本文基于Android智能手机和测量型接收机的静态实验实测数据,进行了Android智能手机GNSS观测性能评估和附加电离层约束单频精密单点定位(PPP)实验。表 1展示了智能手机和测量型接收机的GNSS特性,两款智能手机都具备多系统GNSS观测能力,同时还具备GPS、Galileo和QZSS三系统双频观测能力。
表 1 受试智能手机和测量型接收机的GNSS观测性能
设备 |
Android版本 |
GNSS观测信号 |
伪距 |
载波相位 |
Mate30 |
10 |
G (L1+L5), R (G1), E (E1+E5A), C (B1), J (L1+L5) |
是 |
是 |
V20 |
10 |
G (L1+L5), R (G1), E (E1+E5A), C (B1), J (L1+L5) |
是 |
是 |
Trimble R8 |
\ |
G (L1+L2), R (G1+G2), E (E1+E5A), C (B1+B2), J (L1+L2) |
是 |
是 |
G: GPS, R: GLONASS, E: Galileo, C: BDS, J: QZSS. |
智能手机和测量型接收机观测到的具备单、双频GNSS信号的各系统卫星数目如图 1、图 2所示。由图可知,智能手机的单频可视卫星数可以满足其定位需求,但其观测到的双频卫星总数在特定时间段内小于4颗,因此智能手机目前还不支持全天候双频无电离层组合定位。
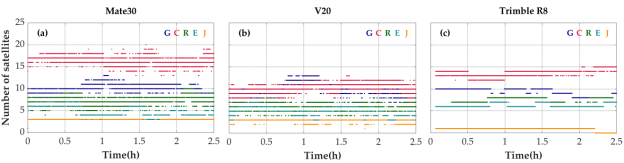
图 1 Mate30(a)V20(b)和Trimble R8(c)观测到的具备单频GNSS信号的各系统卫星数
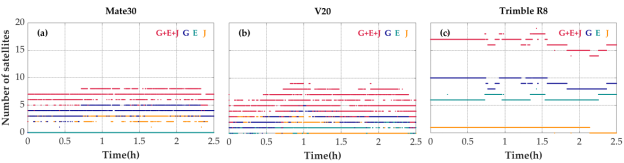
图 2 Mate30(a)V20(b)和Trimble R8(c)观测到的具备双频GNSS信号的各系统卫星数(智能手机只具备三系统双频观测能力,因而图中未呈现GLONASS和BDS卫星数)
载噪比(C/N0)和多路径组合(MP)都是评价接收机GNSS性能的重要指标,它们反映了接收机观测过程中信号强度和环境误差的影响。本文对比了智能手机和测量型接收机实际观测期间各个卫星的C/N0平均值和MP标准差,如图 3图 4所示。由图可知,智能手机在观测期间,其各卫星C/N0平均值均小于测量型接收机,并且智能手机的MP组合标准差约为测量型接收机的10倍。这种现象表明,智能手机在GNSS观测性能上还远不及测量型接收机。
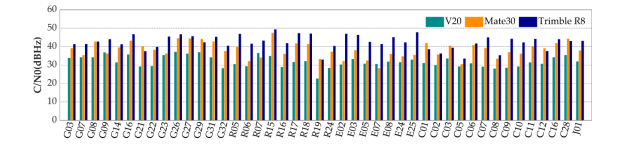
图 3 Mate30(青色)、V20(橙色)和Trimble R8(蓝色)各卫星信号平均载噪比
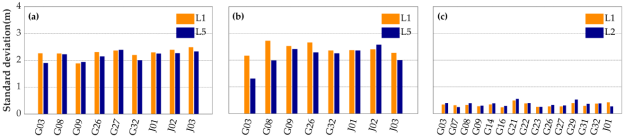
图 4 Mate30(a)V20(b)和Trimble R8(c)各卫星各频点MP组合标准差
由于智能手机目前尚不具备双频无电离层组合定位能力,本文采用了附加电离层约束单频PPP模型进行了Android智能手机精密定位实验。在常规附加电离层约束单频PPP模型基础上,本文在数据预处理阶段使用多普勒平滑伪距方法,使用相位伪距差值(CMC)和多普勒观测值联合探测周跳,形成了适用于Android智能手机的改进PPP算法。为了验证改进PPP算法的精度提升效果,论文还进行常规伪距单点定位(SPP)和标准PPP算法实验,结果如图 5所示。
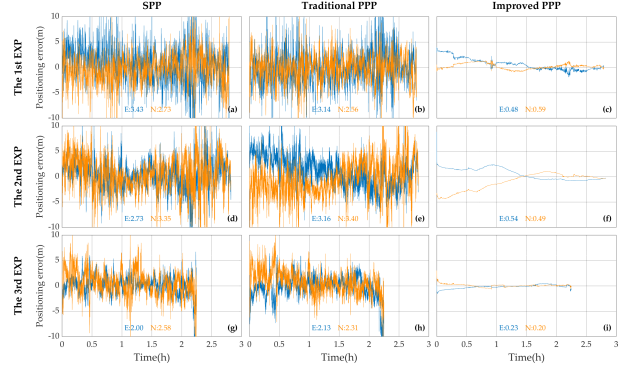
图 5 三次静态观测中Mate30智能手机使用SPP(a、d、g)、传统PPP(d、e、h)和改进PPP(c、f、i)方法后平面定位结果误差及标准差
从图 5可以看出,在本研究中智能手机的水平定位误差标准差小于1m,获得了相对稳定的定位结果。对比不同的定位方法,可以看出智能手机传统PPP方法表现不佳的主要原因有两个:一是对于目前的智能手机,伪距观测量的数据质量相对较差,二是智能手机观测不稳定,卫星失锁十分频繁。本文提出的改进PPP方法在一定程度上克服了上述缺点,从而实现了较好的定位结果。